





















Tất cả sản phẩm
-
Tầm nhìn hồng ngoại cầm tay đa chức năng ban đêm
-
Robot xử lý vật liệu nổ
-
Robot trinh sát thu nhỏ
-
Tầm nhìn ban đêm kỹ thuật số đơn mắt
-
Thiết bị nhìn đêm kỹ thuật số
-
Phòng chống bắn tỉa
-
Radar cầm tay
-
Đèn pin ghi âm tuần tra
-
Thiết bị chiến thuật đặc biệt
-
Phạm vi súng trường
-
Công cụ tìm phạm vi tia laser
-
Mô hình quân sự
-
thiết bị chiến thuật
-
Những mồi nhử có thể thổi
Robot EOD 3D thông minh từ xa để chuyển các vật thể nguy hiểm






| Nguồn gốc | Trung Quốc |
|---|---|
| Hàng hiệu | Particle |
| Số mô hình | REOD500 |
| Số lượng đặt hàng tối thiểu | 1 |
| Giá bán | $205,761 |
| Điều khoản thanh toán | T/T |

Liên hệ với tôi để lấy mẫu miễn phí và phiếu giảm giá.
WhatsApp:0086 18588475571
wechat: 0086 18588475571
Skype: sales10@aixton.com
Nếu bạn có bất kỳ mối quan tâm nào, chúng tôi cung cấp hỗ trợ trực tuyến 24 giờ.
xThông tin chi tiết sản phẩm
| Cánh tay thao tác | Vâng | Nhiệt độ hoạt động | -40oC~+50oC |
|---|---|---|---|
| Điều khiển từ xa | Vâng | Trọng lượng | ≤50kg(Chứa hai bộ pin) |
| Nguồn năng lượng | Pin | tính cơ động | Đường ray hoặc Bánh xe |
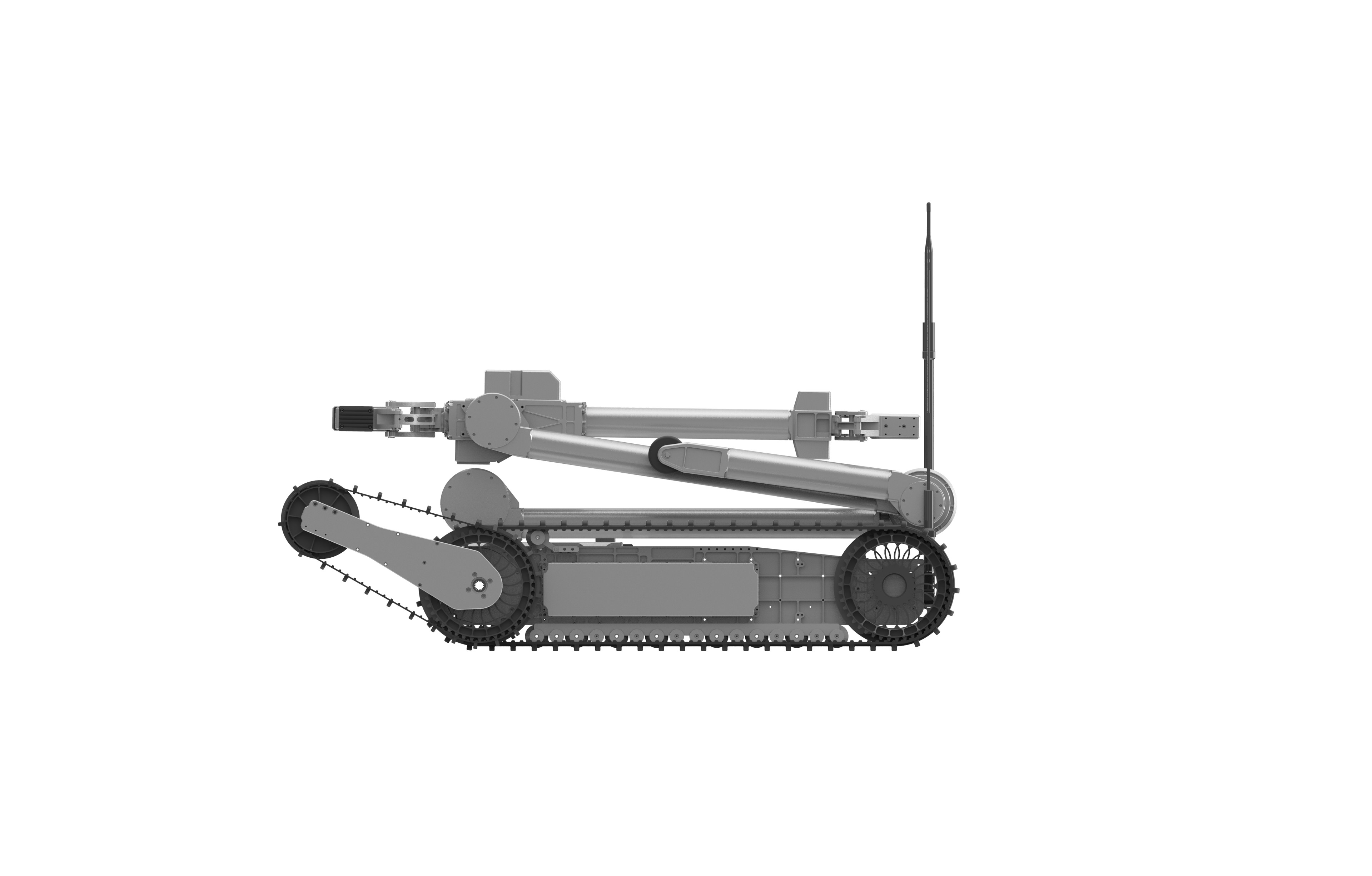
| Kích thước robot | ≤950×650×650mm(Được xếp gọn hoàn toàn) | trọng lượng rô-bốt | ≤50kg(Chứa hai bộ pin) |
| Tốc độ tối đa | ≥2m/s(5 bánh răng, biến thiên liên tục) | Sống vượt qua những trở ngại | ≥400MM |
| Qua chiều rộng rãnh | ≥400MM | khả năng phân loại | ≥45° |
| Nâng cầu thang | ≥45° | Độ sâu lặn | ≥200mm |
| Tuổi thọ pin (Nhiệt độ bình thường) | ≥3h | Chiều dài cánh tay | 2000mm |
| Trọng lượng giật tối đa | ≥40kg | móng vuốt | 2 |
| khớp di chuyển | số 8 | Kích thước bộ điều khiển | 270mm×170mm×100mm |
| Trọng lượng bộ điều khiển | 1,2kg (Không có ba lô) | Màn hình hiển thị bộ điều khiển | Màn hình LCD 7'' |
| Hiển thị video | 7 kênh, một trong số đó có chức năng zoom lấy nét tự động | phương thức hoạt động | Hoạt động hai chế độ của nút Rocker và màn hình cảm ứng |
| Phương pháp kiểm soát | Điều khiển cáp ≥100m (Cáp tiêu chuẩn) ,Điều khiển không dây ≥1000m (Ngoài trời) | Lớp IP nền tảng robot | IP66 |
| Lớp IP cánh tay | IP66 | nhiệt độ lưu trữ | -45oC~+60oC |
| Làm nổi bật | Robot thông minh eod,Hound-II robot eod,Máy robot xử lý đạn nổ pin |
||
Mô tả sản phẩm
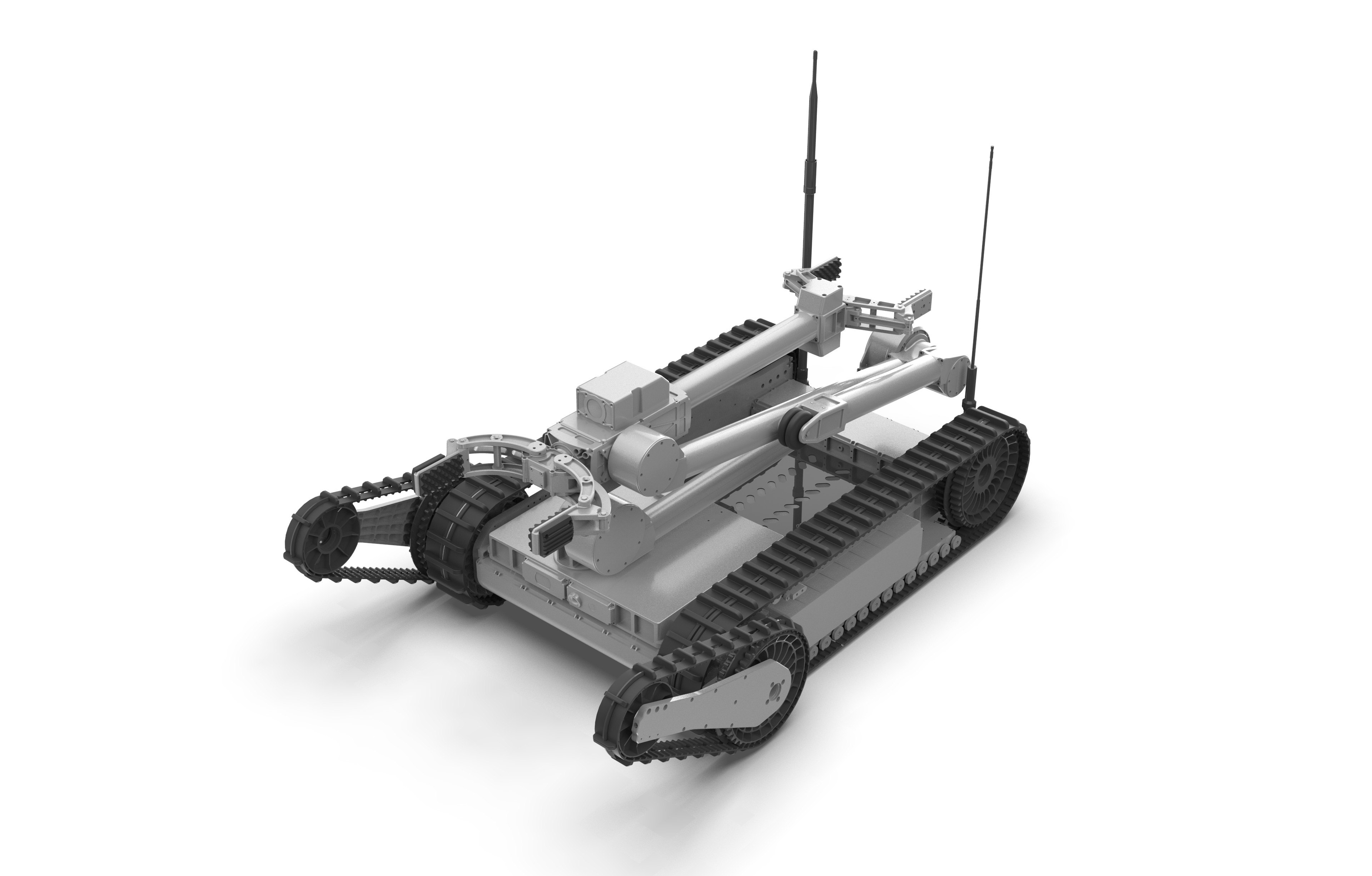
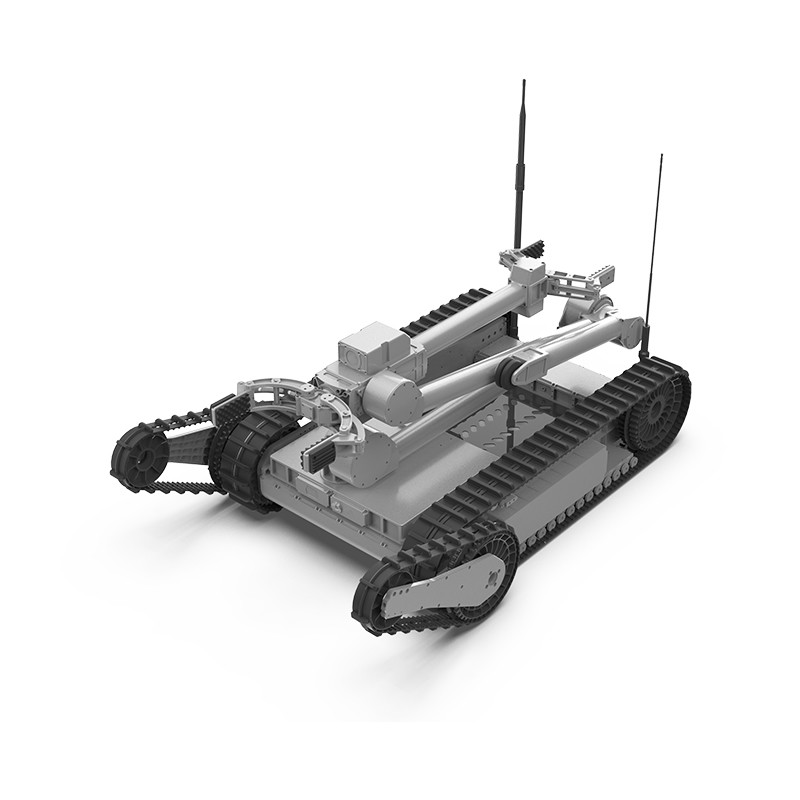
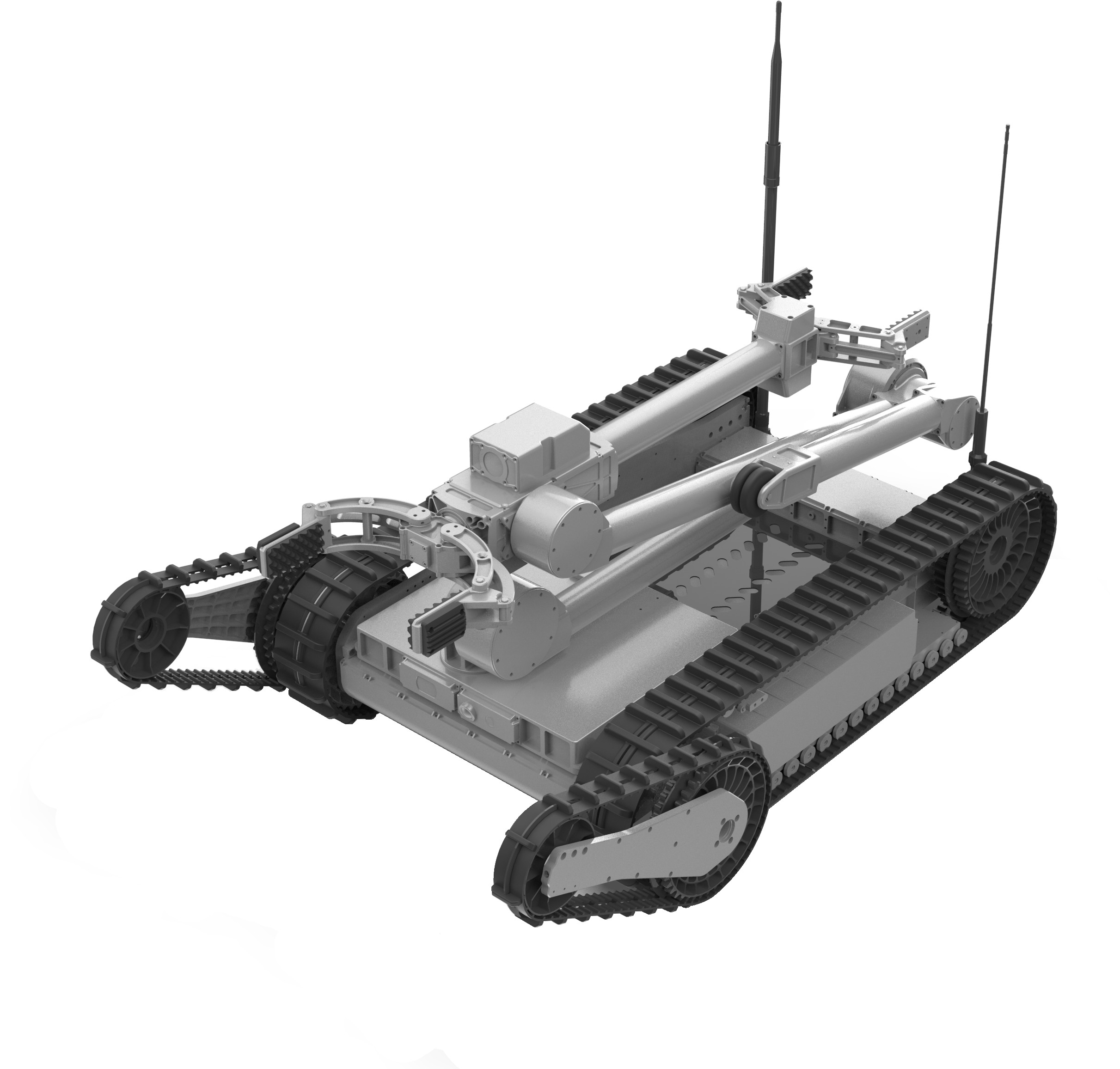
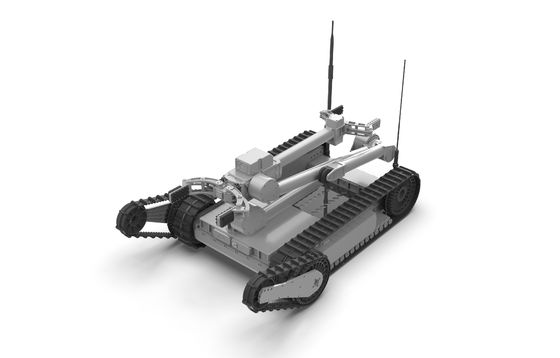
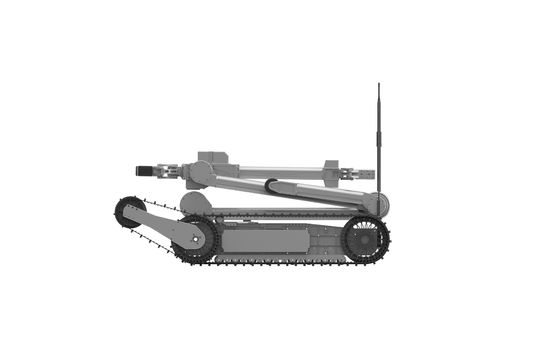
Robot EOD 3D Intelligent Hound-II từ xa để chuyển các vật thể nguy hiểm
|
Ứng dụng JP REOD500 thừa hưởng khái niệm thiết kế tiên phong của robot Hound dựa trên công nghệ nền tảng đi bộ crawler swing-arm,sự kết hợp giữa bộ thu thập thông tin chính và bộ thu thập thông tin chướng ngại vật cánh tay xoay cải thiện đáng kể khả năng vượt qua chướng ngại vật của robot EOD. cánh tay robot tiếp tục thiết kế tích hợp nhiều độ tự do, cung cấp cho phía trước "claw" với phạm vi không gian mạnh mẽ và hiệu suất nắm bắt mạnh mẽ hơn,và cải thiện đáng kể khả năng của robot để xử lý và chuyển các vật thể nguy hiểm.
Chức năng Điều khiển từ xa để tiếp cận hiện trường nguy hiểm,Nghiên cứu các nguồn nguy hiểm tiềm ẩn,Hành động xử lý hoặc chuyển các mối nguy hiểm theo mục tiêu nhiệm vụ,Bảo vệ nhân viên tuyến đầu và công chúng khỏi chấn thương cá nhân.
Đặc điểm 1Thiết kế cánh tay cơ khí được cải thiện, cải thiện đáng kể hiệu suất nắm bắt; ★2. thiết kế bằng sáng chế "2-kẹp", nhiều nhiệm vụ có thể được giải quyết cùng một lúc; 3. Hình ảnh hoạt động hai chế độ, thuận tiện và đáng tin cậy kinh nghiệm hoạt động; ★4. màn hình thời gian thực 3D từ xa, hoạt động tốt trước mắt bạn; ★5. Thiết kế điều khiển "được đặt trước" thông minh, cài đặt cá nhân hóa tư thế làm việc; ★6. thiết kế liên kết cánh tay robot không gian ba chiều "X-Y-Z" dựa trên tính toán tự động giúp bạn điều khiển chính xác; 7. hình ảnh video 7 kênh, quan điểm quan sát phong phú hơn 8Thiết kế cánh tay robot 8 độ tự do, điều khiển linh hoạt hơn; 9Một loạt các công cụ mở rộng có thể được thay thế nhanh chóng để bình tĩnh đối phó với các điều kiện làm việc khác nhau;
Các thông số kỹ thuật
Thông tin chi tiết về REOD500
|
Sản phẩm khuyến cáo